S2K Commerce - Products Dropdown
- ${title}
S2K Commerce - Shopping Cart
- ${title}
Web Content Viewer
- ${title}
Electric Grippers & Rotary Actuators

Features:
- No electricity is used when engaged.
- Gripper retention guaranteed in power loss.
- Long-life brushless DC motor.
- Built in motor driver.
- Self-centering jaw system (patented).
- Fiber-carbon gear reduction.
- Maintenance-free for 10 million cycles.
- T-slot style jaws for heavy loads.
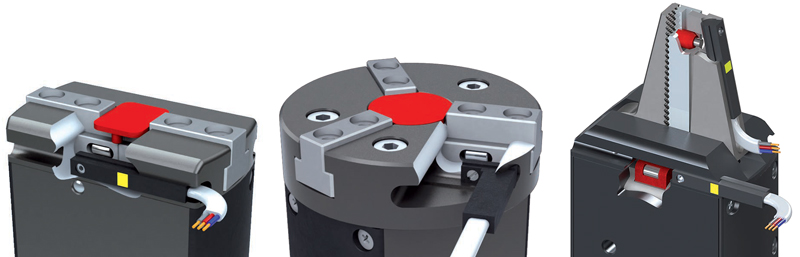
- Optional magnetic sensors.
Electric grippers and rotaries are easy to set up and operate! They use electricity from your PLC instead of compressed air, and are designed to be used in place of traditional pneumatic components where compressed air circuits could be a liability. They operate in an on/off manner receiving their signal directly from a control panel. There is no programming needed or intermediary control device. An added benefit is the energy savings realized because the motor is only used to actuate the device. The actuator position is maintained by mechanical means when an object is gripped and motor cut off.
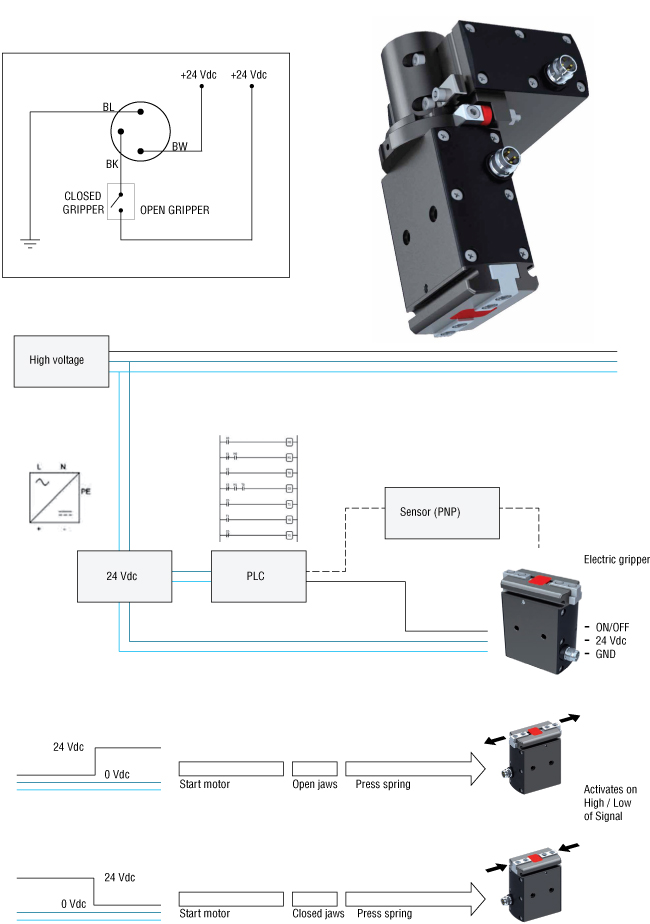
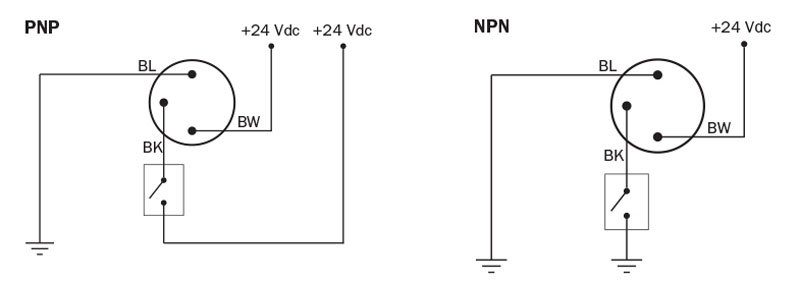
Electrical connection: Both the electric grippers and the rotary actuators run on a 24Vdc power supply and the closing/opening signal (ON/OFF) by the M8 standard connector with 3 poles. No further electronics is necessary to drive the gripper.
Gripping force: These illustrations below show the operating state sequence of the drive system shared by the grippers, the actuators and the electric indexing tables.
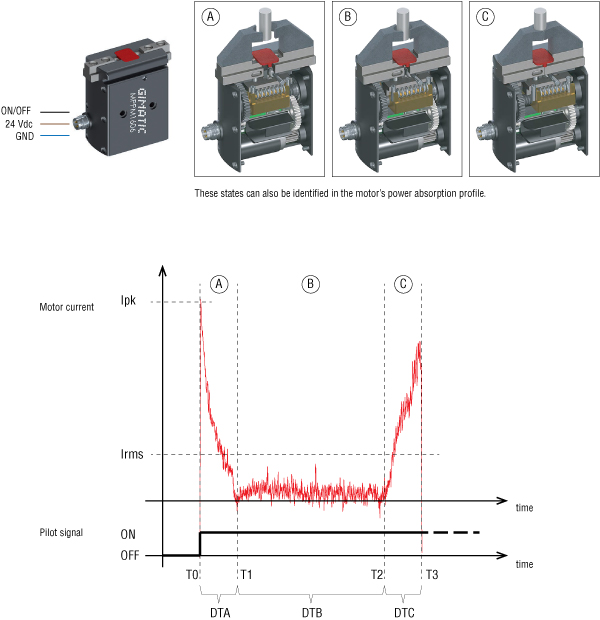
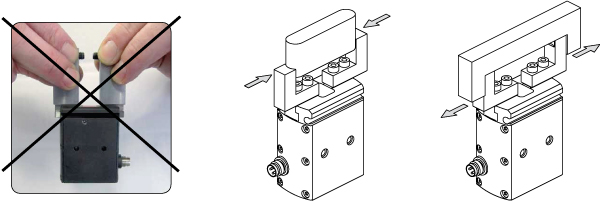
Gripping force: This electric gripper can be used for either external or internal gripping applications. The part will be gripped in any position within the jaw stoke. After the part is gripped, the spring force will hold the part. The gripper mechanism is irreversible, even without a power supply, so do not attempt to open or close the gripper manually.
PNP/NPN versions: Grippers are available in the standard version with PNP input and in the N version with NPN input.
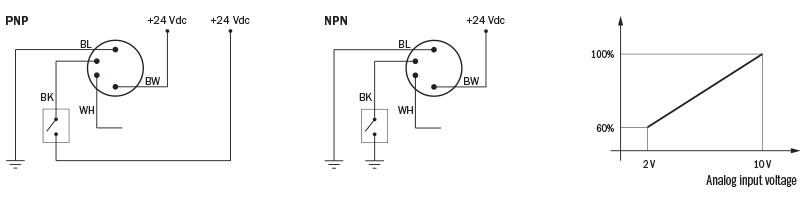
Force control (4-pin versions): In the range of models with 4-pin M8 connector, some versions are available with an analog input channel. By changing the reference voltage in the 2÷10 V range, the gripping force can be adjusted. A voltage value lower than 2 V will inhibit the device operation, allowing the creation of machine safety logics.
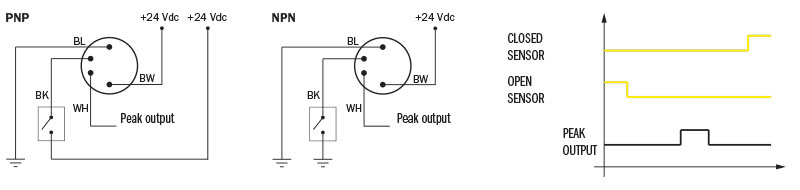
Peak Output: In the range of models with 4-pin M8 connector, some versions are available with a digital output channel which is automatically enabled by the device when the jaws exert the gripping force. This will work like an integrated proximity sensor which can operate independently of the final position of the jaws, and therefore with no adjustment.
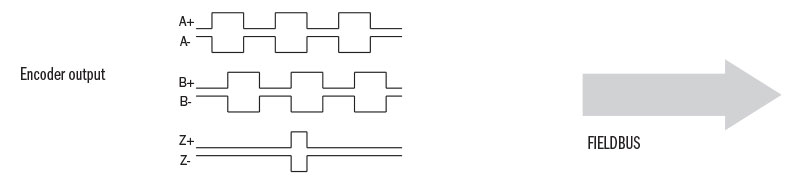
Position output and fieldbus: Versions with an output channel (digital and/or analog) dedicated to jaw position measurement will soon be available, as well as versions set for communication based on digital fieldbus.
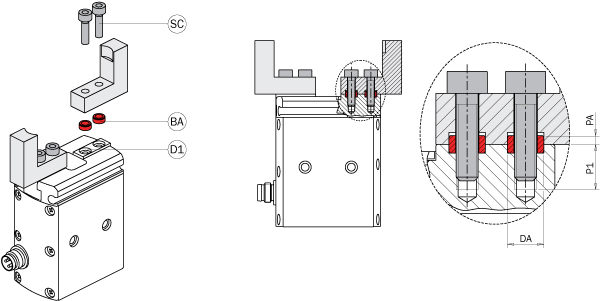
Gripper finger fastening: The gripper fingers should be as short and light as possible. They must be fastened by two screws (SC) and two centering sleeves (BA) in the counterbored holes (D1) of the jaws.
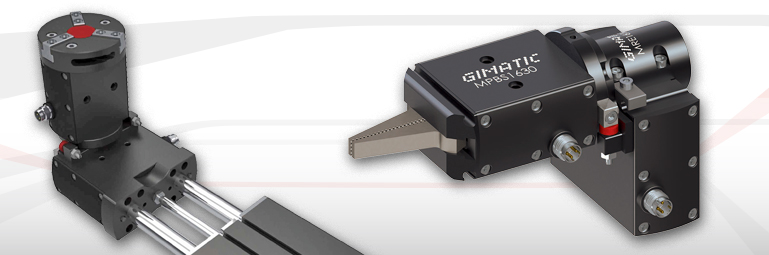
Series compatibility: Most of our Gimatic electric grippers are perfectly compatible with rotary actuators without using a special plate.
Three Jaw MPTM: Installation on a cobot is effortless! Interface plates for the Robot Side and Gripper Side are ISO-9409-1-50-4-M6 compatible.

Two Jaw MPLM: Direct connection to the cobot wrist makes setup easy! ISO-9409-1-50-4-M6 Robot Side and Gripper Side Interface plates are available. Contact us for custom gripper mounting plates.

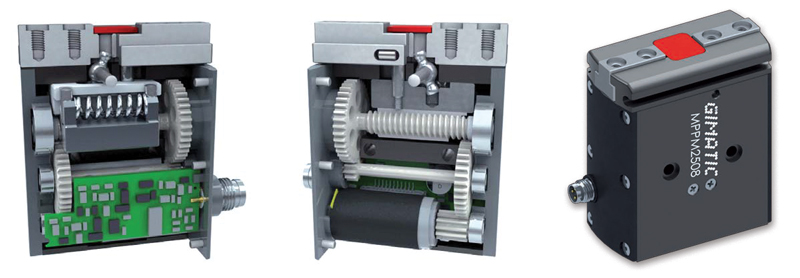
Construction: A microprocessor and all electronics are integrated into the gripper so that no other external controller is necessary. The microprocessor operates the motor and turns it off with no programming required.
The carrier with the patented spring system is driven by a 2-stage reducer and a worm. The carrier drives two jaws with a patented self-centering mechanism--already tested in other Gimatic grippers and holds a 0.02mm repeatibility. Jaws are made of stainless steel and placed into a precise “T” grove in order to keep the force as strong as possible along the fingers.
The body is black anodized aluminum 40 μm deep and 460 HV hardness to help maintain a clean state. All screws are stainless steel and side covers are 30% GF nylon. Everything is well sealed to achieve an IP54 rating and many of the models are certified ISO Class 4 for cleanroom use. Please contact Gimatic USA for details.
Digital Sensors: On both sides of the gripper there is a “C” groove in order to check the position of the jaws by standard magnetic digital sensors (SS/SN). Where it is not possible to get magnetic positioning, inductive sensors fixed on special brackets can be used. It is possible to get also ANALOG position reference by our newest 0÷10 V Analog output sensors for “C” slot. The S version of the MPBS sprue gripper type model (shown right) also comes with a with magnetic gripping sensor on the jaw.